
介護・福祉ロボットシステム研究室
趙 菲菲
Feifei Cho
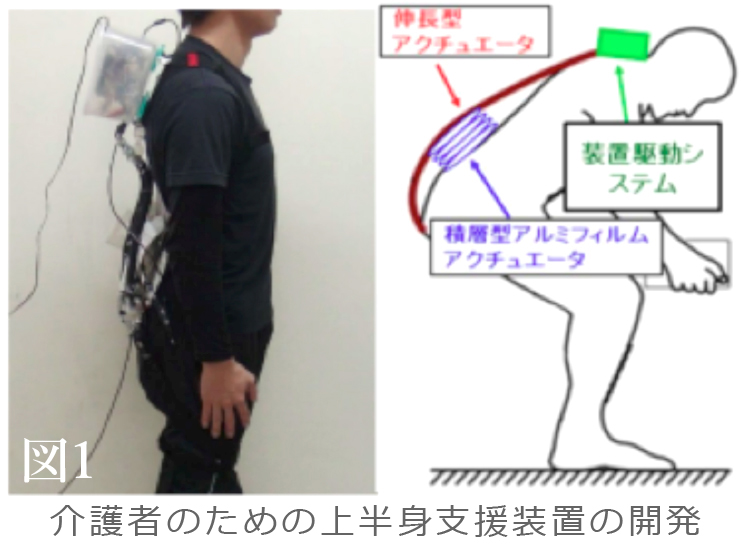
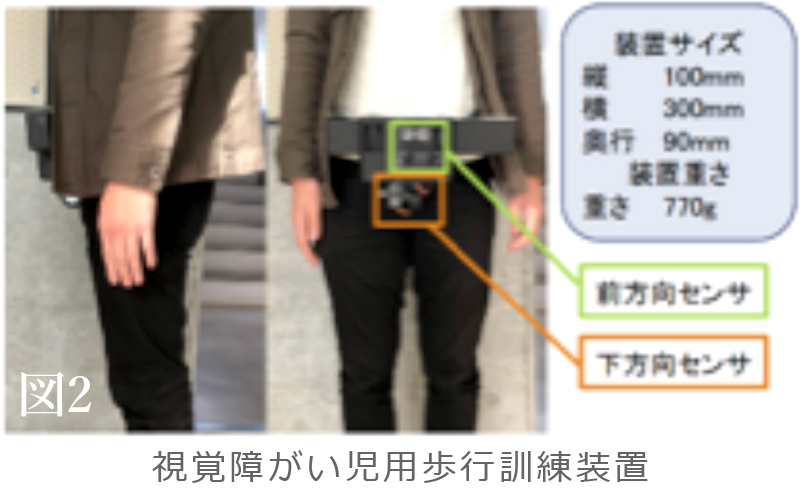
ソフトアクチュエータや組み込みコントローラーなどを用いた一般家庭でも使用できる介護・福祉ロボットシステムに関する研究を行っている。介護者のための上半身支援装置は人間親和性の向上が期待でき、腕部を加え、介護動作の妨げにならない空気圧アクチュエータを用い、狭小・高湿スペースでも利用できるように安価、軽量かつ防水できる組み込みコントローラーの開発も行っている。視覚障がい児用歩行訓練装置は人手不足という問題に直面している歩行訓練士の負担軽減および保護者の心身負担軽減を目標とし、盲児の将来自立を考慮し、一般家庭でも使用できる訓練システムの構築を目指している。また、高齢者・重度障害者を介護する際、寝たきり要介護者褥瘡防止の体位変化作業は必須であるため、介護者の拘束時間が増えるなど、精神的な負担も増える。そのため、問題解決に向けて扁平的ソフトアクチュエータを用い、加圧を時間的に変化させることで、身体とアクチュエータとの接触位置を変え、隙間の生成による蒸れ防止などもできるマットレスの開発を行っている。
テーマ例:
・介護者のための上半身支援装置の開発(図1)
・視覚障がい児用歩行訓練装置(図2)
・高齢者・重度障害者用褥瘡防止のための自動マットレスに関する研究 など
専門分野
メカトロニクス、福祉工学、空気圧制御機器
キーワード
介護・福祉ロボット、ウェアラブル装置、柔軟アクチュエータ

岡山理科大学情報理工学部
情報理工学科